UAV�Ƃ͏�����悹�Ȃ��A������s���\�ȍq��@���w���܂��B
�t�H�b�N�X�ŊJ���������l��s�D��G�A�[�|�[�^�[�́A
�ᑬ��s��y�C���[�h��s���\�Ȃ̂�UAV�̃e�X�g�x�b�h�ɂ�
�œK�̋@�̂ł��B
RC UAV���s����l�X�ȍ�Ƃ̗�
���w��n�_�ł̎ʐ^�B�e��r�f�I�B�e
���댯�n�тł̏����W
���댯�n�тւ̕�������
���w��G���A�̍q��Ď�
|
 Back to FOX corporation Back to FOX corporation
���ЁA�t�`�u�t�s�k�|�P�P�̊J���R���Z�v�g�B
��w���ōs���Ă��鐧��Z�p�̊�b�����Ȃǂł́A�w�����������삵������v���O���������ۂɋ@�\���邩�Ȃǂ̎������s�����Ƃ���������܂��B���̂悤�ȏꍇ�ɁA���݁A������s�ɓK�����@�͔̂��ɏ��Ȃ��A�L���Ă������ŁA�\�Z�팸�̍����A���������x���ł͂Ȃ��Ȃ������ȋ@�͍̂w���ł��܂���B
���Ђł͒��N�ɂ킽��A��w�Ȃǂł̎�����s�̃T�|�[�g�̌o������A
������p�Ŏ����ł���q��@�ނ̊J�����K�v�ł���ƔF�����܂����B
�����Őv���ꂽ�����p�@�ނ��t�`�u�t�s�k�|�P�P�ł��B
���݁A��^�̋@�̂��v���ł��B |
| |
| �m�d�v�r�I�I |
2017/09/17
�t�H�b�N�X�@�R�[�|���[�V�����̓I���W�i���A�C�f�A�̂t�`�u����@�̊J����
�X�^�[�g���܂����B
���̋@�̂̓R���o�C���h�N���t�g�ƌĂ�ł��܂��B
�߂������ɋ@�̂̂R�ʐ}�����J���܂��B
|
 |
�G�A�[�|�[�^�[�@�t�`�u�t�s�k�|�P�P
�������I�I
���ʐ^�̓t�H�b�N�X�ŊJ�����ꂽ�A�G�A�[�|�[�^�[�ł��B
�ʏ�̃��W�R���@��UAV�Ȃǂ̎����@�Ɏg�p����ꍇ�A
���ڋ@��Ȃǂ�ςޏꏊ�������A����܂ő傫�ȕ��Q�ƂȂ��ė��܂����B
���Ђ̃G�A�[�|�[�^�[�͊e���w�⌤���@�ւȂǂ̎����p�@��
�Ƃ��ĊJ������Ă���A�l�X�ȑ��u�̐ύڂ��\�Ȃ悤��
�v����Ă��܂��B
�@�̂͌y�ʂȃo���T�ނŏo���Ă���A���S�҂ł��g�ݗ��Ă�
�s����悤�ɍ����x�ȃ��[�U�[���H�@�ōޗ������H����Ă���A
�v�����f�����o�ō���悤�ɐv����Ă��܂��B
|
 |
���ʐ^�͋@�A�J�[�S�X�y�[�X�B
���@�ɂ͍��v�łR�ӏ��̃J�[�S�X�y�[�X���L��܂��B
�@��CCD�J������A�ԊOIR�J�����Ȃǂ̉摜�n�̓��ڂ�
�K���Ă��܂��B
|
 |
���ʐ^�̓��C���J�[�S�X�y�[�X��i�ł��B
���̃X�y�[�X�͑S�����قڂQ�O�O��������A�㉺��K���č\����
�Ȃ��Ă��܂��B��̕����ւ͂����ɐ���@���AI�@M�@U�AGPS�n��
���䑕�u��{�[�h�R���s���[�^�[�Ȃǂ̐���n�B
���̃X�y�[�X�͏�ʂ��嗃�ŕ����܂��B
���̃X�y�[�X�͉��ʂ����S�ɊJ������Ă���A�摜�n��B�e�~�b�V�����A
�T���v���̎�p���O�̓��ځA���������ȂǗl�X�ȃ~�b�V������
�Ή��ł���X�y�[�X���m�ۂ��Ă��܂��B
|
 |
���ʐ^�̓G�A�[�|�[�^�[UAVUTL�|�P�P�ɃJ�������ڃ��j�b�g��
���t�����l�q�ł��B
���̃J�������ڃ��j�b�g�����t����ƁA��y�ɍq��B�e���\�ł��B
���ʐ^�@�d�g������
�����̎ʐ^�͂��̃��j�b�g�ŎB�e�����q��ʐ^�ł��B
|
 |
���̗l�Ɏ�y�ɍq��B�e���o���Ă��܂��G�A�[�|�[�^�[UAVUTL-11
�ł��B
����B�e�Ɏg�p�����J������PENTAX�@OptioW80���g�p���Ă��܂��B
�J�����d�ʂ���P�U�T���i�V���b�^�[�T�[�{���݁j�ł����A
�G�A�[�|�[�^�[UAVUTL�|�P�P�͊ȒP�ɕ����オ��܂��B |
 |
���ʐ^�̓I�v�V�����ݒ�̃f�W�J�����ڃ}�E���g�ł��B
���̃}�E���g���g�p����ƁA�s�̂̃f�W�J�����ȒP��
���ڂł��܂��B
�J�����}�E���g�@�I�v�V�������i�Q�P�O�O�~�ł��B
�ʐ^�̃f�W�J���͓��R�t�����܂���B�@ |
 |
�G�A�[�|�[�^�[�ɂ́A���ЂŔ̔����Ă���R�p�C���b�g�Q�̓����g�p�����������߂��܂��B
�@�̂��Ƃɂ������肵�܂��̂ŁA�l�X�ȃ~�b�V�����ł̐����������サ�܂��B
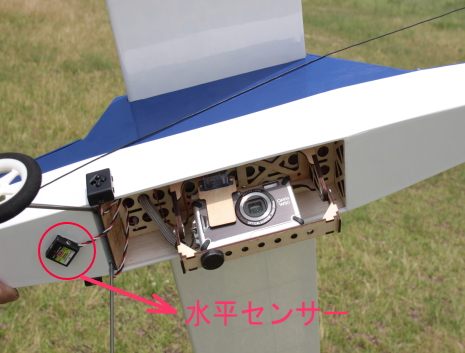
���ʐ^�̐Ԙg�̓R�p�C���b�g�Q�̃��C���Z���T�[�i�����j�ł��B
�@�̉��ʂɎ��t����ꍇ�A�J�����Ȃǂ̃y�C���[�h�����C���Z���T�[��
�����W���Ȃ��悤�ɁA�ʐ^�̂悤�ɂw�}�E���g�ɂĎ��t���܂��B
�G�A�[�|�[�^�[�̓��_�[�@�ł����A���[�����ƃs�b�`���ɃR�p�C���b�g�Q��
�ڑ�����ƁA�������ł̔�s���X���[�X�Ƀ~�b�V���������Ȃ��܂��B
�R�p�C���b�g�Q�͌��ݎ�舵���Ă��܂���I
2017/08/20 |
 |
�y�C���[�h��s��O���Ɏ嗃���`��I�肵�Ă��邽�߁A
�J�����𓋍ڂ��Ă̔�s�ł��A���̂܂ܗ��K�@�Ƃ���
���p�ł�����̈��萫�������܂��B
�����@�@�@�@�@�@
�@�@�@�@�@�@�S���@�@1045����
�@�@�@�@�@�@�S���@�@1400����
�@�@�@�@�@�@�d�ʁ@�@943���@
�@�@�@�@�@�@���ʉd�@�@33.7��/d�u
�@�@�@�@�@�@���ʐρ@�@�@28���u
�@�@�@�@�@�@���[�^�[�@�s�̂Q�Q�P�R�N���X�̃u���V���X���[�^�[
�@�@�@�@�@�@�X�s�[�h�R���g���[���[�@�R�O�`���x
�@�@�@�@�@�@�o�b�e���[�R�r�@�P�P�D�P���@�@
�@�@�@�@�@�@�e�ʂ̓~�b�V������s���Ԃɂ��R�T�OmA�`�R�O�O�OmA
�@�@�@�@�@�@���x�܂�
�@�@�@�@�@�@��s���ԁ@���ڃo�b�e���[�ɂ��B�@
�ʐ^�@�d�g������ |
��L�G�A�[�|�[�^�[UAVUTL-11�Ɋւ��邨�₢���킹��
�t�H�b�N�X�R�[�|���[�V����
�O�V�W�|�W�Q�Q�|�P�S�Q�Q�܂ŁI
|
��w���Ŗ{�@�̑g�ݗ��Ċ����@��[����]�̏ꍇ�A�ʓr�Ή�����
���܂��̂ł��₢���킹���������B |
 |
2010 ��
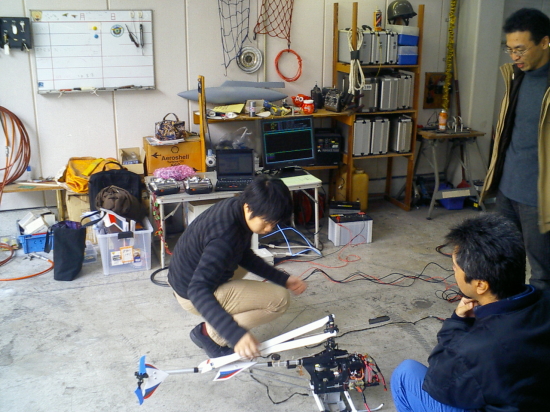
UAV��s�D�̔�s�����ɂċ@�ރI�y���[�V�������s���Ă���l�q�B
�l�X�Ȑ��䑥���������邽�߁A���̐���R���s���[�^�[��
�L�l��s�̐�ւ������u�ōs���B
�����̋C�̊ɂ݂������Ȃ��ْ��������B
�ԊO�̐����M�ҁB |
 |
���ʐ^�͂U�Q�����G���W�������E�ʁX�ɓƗ����ē�����
�x�N�^�[���j�b�g�ł��B
�c�O�Ȃ���ڍׂȕ����͌��J�ł��܂��A
���E�̃G���W���̌�����ʁX�ɑ���ł��邽�߁A
��s�D�̋@�������i�i�Ɍ��サ�܂��B |
 |
�t�H�b�N�X�ŊJ���������^�B�e�p��s�D�̃S���h�������B
�r�f�I�J�����Ȃǂ̎B�e�@�ނ𓋍ڂ��āA�����R�ɔ�т܂��
�U���̖����N���[���ȉf������܂��B |
 |
�X���X�^�[�̐��䕔�B
�V���v���Ōy�ʉ����͂���A�~�b�V�����y�C���[�h���S�����҂��o���܂��B
�܂����ړd�r���T����ڑ��܂œ��ڂł��A�����Ԃ̃~�b�V�����ɂ��Ή��\�ł��B |
 |
�X���X�^�[�̊p�x�͎��R�ɕύX�ł���x�N�g���X���X�^�[�����Ă���A
�㏸�≺�~���v���̂܂܂ɑ���ł��܂��B |
 |
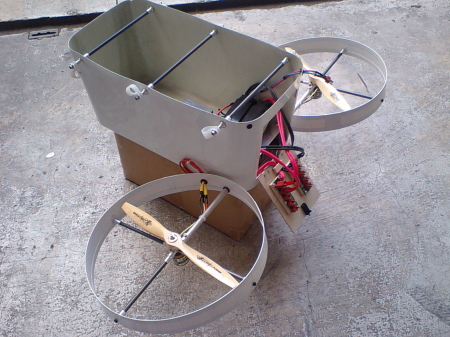
�����^��s�D�̈��B
�S����T���A���ڃy�C���[�h�͖�Skg�B
|
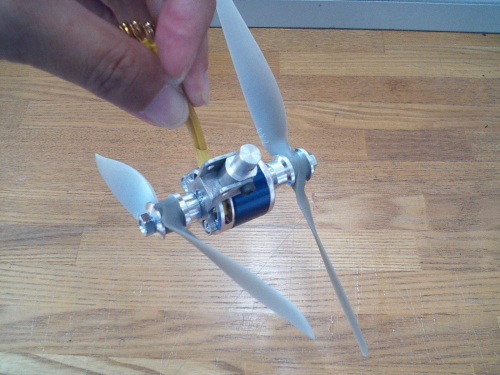 |
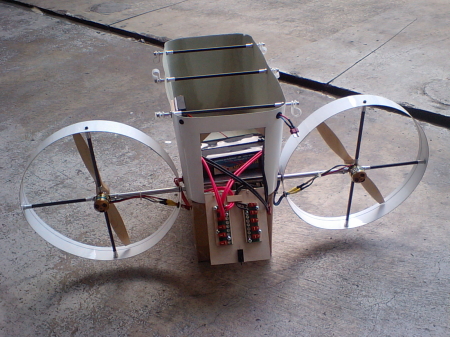
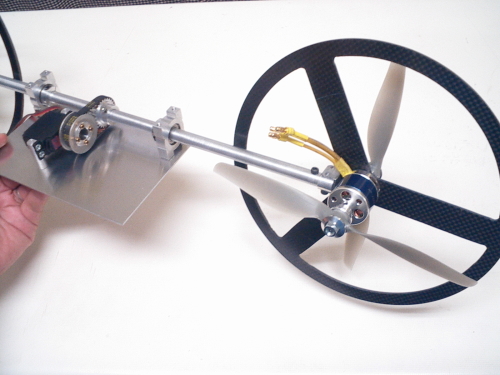
���̃��[�^�[���j�b�g�͓������]�œ�̃v���y������]�����܂��B
�v���y���̉�]���a���������������ׂɎʐ^�̗l�Ƀ^���f���������̗p���܂����B
���̃^���f�������ʼn�]���a�͏������Ă��傫�Ȑ��͂������܂��B |
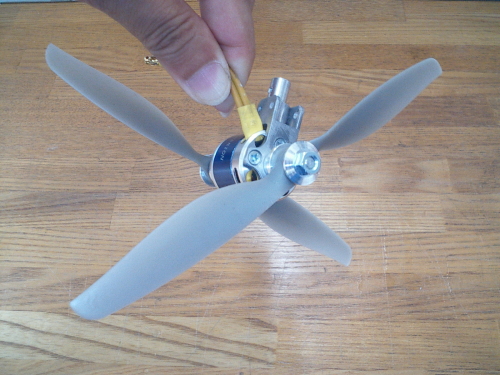 |
���ꂼ��̃y���̈ʑ��͈Ӑ}�I�ɂ��炵�Ă݂Đ��͂ɕω���
�o�邩�ǂ������������܂��B |
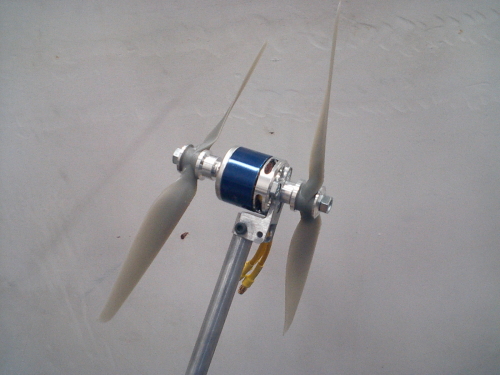 |
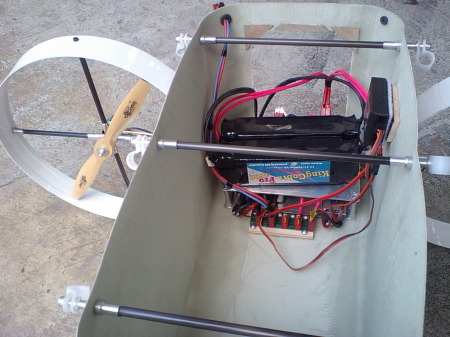
���̃��[�^�[���j�b�g�͍��ʐ^�Ɍ�����V���t�g�ŕێ�����Ă���A
���̃V���t�g�͎������ɂP�W�O�x��]���܂��B
���̃x�N�^�����O���j�b�g�ɂ͍X�Ƀy���O����ی삷��ی샊���O��
���t�����܂��B
�g�p����郂�[�^�[�́A�����ƃ����e�i���X�����l���������ʃu���V���X
���[�^�[���g�p���邱�ƂɂȂ�܂����B�]���̃u���V�i�ړ_�j�����[�^�[���ƁA
���[�^�[�̎������u���V�Ɉˑ����܂����A�u���V���X���[�^�[����
���̓_���l������K�v���Ȃ��Ȃ�܂��B |
 |
���̃��j�b�g�̓X���X�^�[�̌�����ς���x�N�^�[���j�b�g�ł��B
����ȃT�[�{���g�p���Ă���A�^�ォ��^���܂ŔC�ӂ̈ʒu��
�X���X�^�[�̌�����ω������邱�Ƃ��o���܂��B
�X���X�^�[�̎��͂̍��������O�̓v���y���u���[�h�̕ی�p��
�A�E�^�[�����O�̃u���P�b�g�Ōy�ʂŋ��x�̍����h���C�J�[�{�����g�p���Ă��܂��B |
 |
�A�E�^�[�����O�����t�����l�q�B
�����ʼn^�p������s�D�ɂ͕K���댯�h�~�Ƌ@�̕ی�̂��߂�
�A�E�^�[�����O���K�v�ł��B |
|
|
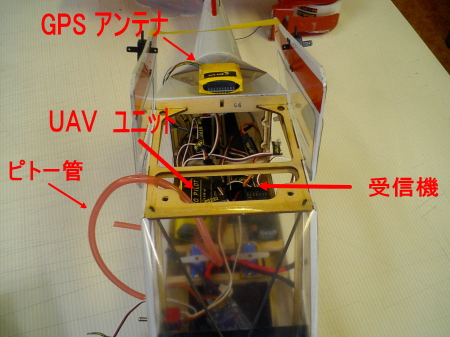 |
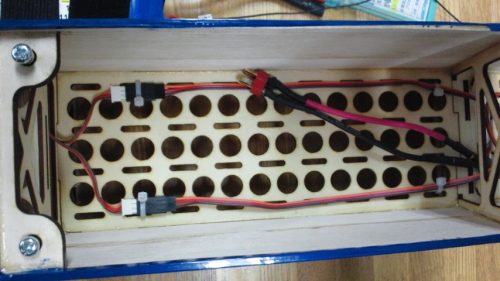
�������E�B���K�̓��̂ɂ�������Ƌl�ߍ��܂ꂽ�t�`�u���j�b�g�B
�`���[�u�͈��̓Z���T�[�ɒʂ��Ă���A�嗃�ɌŒ肳���s�g�[�ǂ�
�������Z���T�[�܂œ`���܂��B
��s���̋@�̂̑��x�𐧌�ł���킯�ł��B |
 |
�_�ˑ�w�łt�`�u�̊�b�������s�����߂̓d���w���R�v�^�[�B
���̓d���w���̓t�H�b�N�X�œd���w���Ƃ��č쐬����A�_�ˑ�w��
�t�`�u�̌����f�ނƂȂ��Ă��܂��B
�e�X�g��s��@�̂̃����e�i���X�Ȃǂ��t�H�b�N�X�ōs�����ƂŁA
�t�`�u�Ƃ��Ă̕K�v�ȋ@�\���s���\�Ȃǂ̏�����Ă��܂��B
|
 |
�@�̂𐧌䂷��R���s���[�^�ށB
���݂̊�b�����i�K�ł́A�O������̐M����L���ŋ@�̂ɑ��邱�ƂŁA
�R���s���[�^�[�����c���鎎�����s���܂��B
��s���̃f�[�^�̓R���s���[�^�[�ɒ~�ς���āA�X�ɍׂ���
����v���O�����̊�����܂��B |
 |
�@�̂̉����ɓ��ڂ��ꂽ�p���F���p�̃W���C���Z���T�[�B
���݂͗L���P�[�u���ŃR���s���[�^�[�ƌq�����Ă��܂����A
�������i�ނɂ�ăR�[�h���X������Ă䂫�܂��B
�e�[���ɓ��ڂ���Ă���̂͂h�q�Z���T�[��p�����������葕�u�A�R�p�C���b�g�ł��B |
 |
����UAV�Ɏ��t����A�ً}����p�̉�����u�ł��B
���̗l�ȕς�������܂ʼn��ł����삵�Ă��܂��܂��B |
 |
���䑕�u�͂����̂悤��Box�̋��Ƀ}�E���g����Ă���A
���u�̑����W���܂���B |
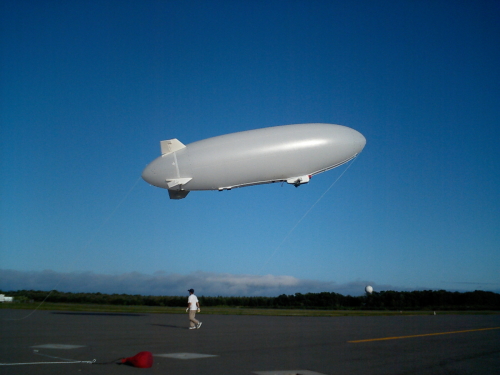 |
�t�`�u�Ƃ��āA������s��ڎw���Ĕ�s�������̔�s�D�B
�S���͖�P�Q���{���ő�ϑ傫�ȕ��ł��B |
|
Back to FOX Corporation |